defectix Documentation
0.9.0
defectix is a software whose goal is to perform an automatic detection of optical defects on wide field images of deep space. Imaging surveys originating from wide-field instruments suffer from a number of optical defects as diffraction spikes, halos, etc. We describe a system based on machine learning which can identify automatically these artifacts in pixel data. The software is still under development and testing. When it is completed, this new Terapix tool will be made available to the community under the GPL license as defectix.
defectix must identify large artifacts directly from pixel data because it must create masks as pixel data as well. The main difficulty lies in the large scale range of defects. Compared to "real-life" images, lightning and perspective effects are not relevant for the analysis of astronomical data. For this reason machine learning is a simple and efficient approach. A supervised system based on neural networks should be able to treat arbitrary defects without the need to code any new detection algorithms. Our software deals with artifacts such as halos, diffraction spikes, satellite trails and scattered light. Once the network has been trained, defectix acts as a non linear translation invariant filter.
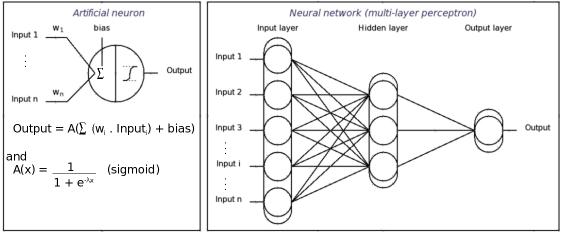
Neural networks used in defectix are Multi-Layers Perceptrons (MLP) with one hidden layer, as shown on the following figure. They are trained using rprop algorithm.
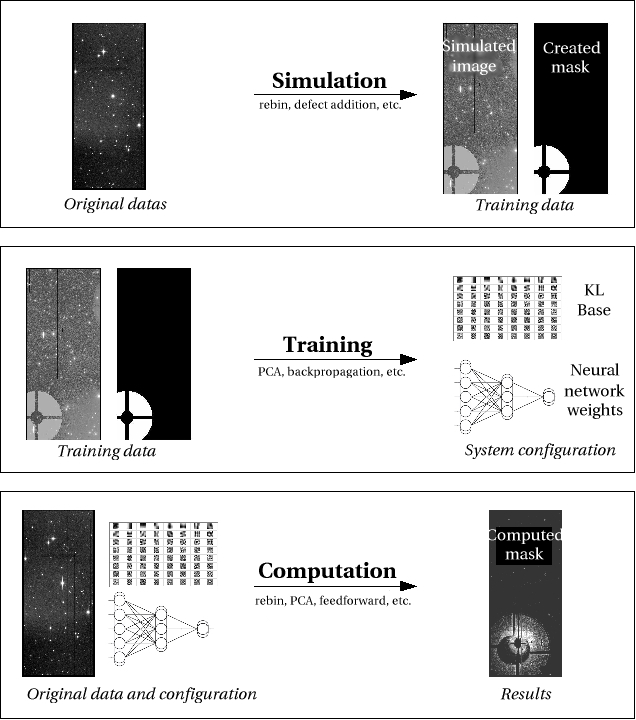
Original images are first rebinned to better match the seeing. A background model is then substracted. Defects are added with random positions, intensities and sizes. Corresponding masks are created simultaneously. Only one simulator is coded yet for halos. Images are dynamically compressed using the following function:
y(x) = ln ( 1 + x / sigma) / |x|, where sigma is the standard deviation of the global background.
Principal Component Analysis (PCA) is carried out on blocks of n x n pixels. Only the k first components are used as inputs to the neural network. Typically, n = 8 and k = 16 (among 64).
Neural network is trained with:
input: principal components of each block. output : value of the mask for the central pixel of the block.
Images are analysed as blocks as for training. Blocks slide along the image to compute a mask value for each pixel of the original image.
For more details about defectix principles, one can read the project presentation or the project report (available only in french for now).
defectix was developped by Anthony BAILLARD for TERAPIX team.
For questions, suggestions or bug reports: baillard@iap.fr
Generated on Fri Jul 2 13:08:03 2004 for defectix by
 1.3.5
1.3.5